
定义
光场显微镜(LFM)是通过在传统光学显微镜的中继像面上插入一块能够捕获光场信息的微透镜阵列来实现的。通过4D光场数据的反演能重建多视角图像和多层焦平面图像,引入去卷积算法和断层重建能实现三维显微成像。由于这些后续处理都可通过一次曝光实现,因而对观察运动的微生物和光敏感样品有其独特优势。
背景
光场成像的雏形可以追溯到1903年Ives发明的双目视差显示系统中运用的针孔成像技术,通过在主透镜的像面处放置针孔面阵列,从而使原像面处的光辐射按角度进行重分布后记录在光探测器上,避免了角度信息的丢失。
1908 年,Lippman 发明集成照相术( integral photography,IP),后来被广泛运用于三维全息成像。通过用微透镜阵列代替针孔面阵列,在底片上接收到有微小差别的一系列基元图像,消除了Ives 装置中的弥散斑。
Gershun 在1936年提出光场的概念,将其定义为光辐射在空间各个位置向各个方向的传播。他认为,到达空间不同点处的光辐射量连续变化,能够通过几何分析进而积分的方法来计算像面上每点的光辐射量。但是由于计算量庞大,能够进行高次运算的计算机尚未出现,所以当时未能对其理论进行验证。
1948 年,Gabor 利用2束相干光干涉记录下物体衍射未聚焦的波前,获得第一张全息图。如果把这张全息图看作是包含方向和位置信息的光辐射函数,那么这其实也是一张特殊的光场图像,而非传统只记录强度信息的二维图像。
20 世纪六七十年代,Okoshi、Dudnikov、Dudley、Montebello等学者对IP 技术进行了不断的改进,微透镜阵列在成像方面的作用也得以凸显。
随着计算机技术的不断发展和微透镜制作精度的提高,Adelson 于1992年将光场理论成功运用到计算机视觉,并提出全光场理论( plenoptic theory)。
光场理论的进一步完善归功于1996 年Levoy 的光场渲染理论( light field rendering,LFR),他将光场进行参数化表示,并提出计算成像公式。在此基础上,2005 年,Ng 发明了第一台手持式光场相机,其原理简单,使用方便。2006 年,Levoy 将LFR 理论运用于显微成像,并研制出光场显微镜( lightfield microscopy,LFM) ,能够一次曝光得到多个视角多组焦平面图像,从而得到大景深的显微图片,并可进行三维重建。
目前,随着光电技术及器件的发展和光场理论的进一步完善,光场成像正逐步渗透到航空拍摄、动画渲染、安全监视、科学仪器、摄影传媒、立体显示等各个领域,并朝着集成化、实用化、多元化的方向迈进。
工作原理
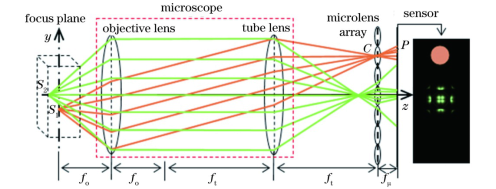
光场概念最早由Gershun提出,用来描述三维空间中光的辐射传输特性。若忽略光的衍射和干涉等波动特性,光辐射可近似为几何光线。对于给定的光线,在有限的自由空间中的辐射不发生变化,可用一个四维函数Ф(x,y,θ,ψ),即空间的二维位置信息(x,y)和二维方向信息(θ,ψ)来表示光场信息。基于光场理论,在传统显微镜筒镜和相机传感器之间添加一片微透镜阵列(基于非聚焦型光场相机原理,微透镜阵列(基于非聚焦型光场相机原理,微透镜位于筒镜的后焦面上),构成光场显微成像系统,利用微透镜阵列和相机传感器可记录物空间的光场信息。下图为光场显微成像的原理示意图。物镜接收测量体中点源S1发出的光线,经筒镜后会聚在微透镜阵列上,每个微透镜将接收的光线按方向分散到其后焦面处传感器的不同像素上。因此,每个像素都对应记录某个特定方向的光线,如对落在传感器面上像素点P的光线,可用点P的坐标及对应微透镜中心C的坐标复原光线的方向信息,从而实现光线方向信息的记录,而传统相机只能记录二维位置信息。
光场显微成像的应用
1、微透镜阵列。这是最常用的光场获取方式,实现方式也最简单。在普通成像系统的一次像面处插入一个微透镜阵列,每个微透镜元记录的光线对应相同位置不同视角的场景图像,从而得到一个四维光场。微透镜阵列所在平面可看作图1 中的u-v 面,探测器面可看作x-y面。Adelson的全光场相机,Ng的手持光场相机,Levoy的光场显微镜( LFM),Fife 的光场“芯片”以及Georgiev 的Plenoptic Camera 2. 0等,都是采用微透镜阵列来获取四维光场数据,只是在u-v面和x-y面的处理上略有区别,从而实现不同的功能。其中,Adobe 公司的光场相机,采用透镜和棱镜阵列获取光场数据,相比传统的微透镜阵列方式,可移植性更强。它将透镜和棱镜集成为一个光学元件,外接在普通相机上即可实现,具有较高的图像分辨率;但是由于镜头外接,会引入新的像差。
2、相机阵列。它是指通过相机在空间的一定排布来同时抓取一系列视角略有差别的图像,从而重构出光场数据的方法。比如斯坦福大学的128 相机阵列,采用不同空间排布,能够获得一些异于普通相机的特性,包括空间分辨率、动态范围、景深、帧速、光谱敏感性等。其中大尺度空间排布的相机阵列主要用于合成孔径成像实现“透视”监测,或通过拼接实现大视角全景成像,而紧密排布型则主要用于获取高性能的动态场景。还有Isaksen的单相机扫描系统,是通过相机在场景中特定移动获取不同视角的图像,它构建的初衷在于研究光场数据的动态参量化。此外,比较成功的样机还有MIT 的64 相机阵列,卡耐基- 梅隆大学的“3D Room”等。
3、掩膜及其他。其共同点在于都是对相机的孔径做相应处理,都能重构出光场数据。典型的有Veeraraghavan 的光场相机,通过在普通相机光路中插入一个掩膜实现。其获取的图像看似与普通相机类似,但经过变换到频域后发现,其频域呈规律性分布,与光场数据的频域特性类似,也能处理得到四维光场信息。它的优点在于掩膜是非折射元件,不管是从后期成像质量还是硬件方面,都比微透镜阵列更容易实现。可编程孔径相机插入的是一个特殊的遮光板,它可以通过编码来提取图像的空间分辨率和景深,也可以重构出四维光场。环形孔径相机,结构比较复杂,须做退卷积处理,可达到较高的图像分辨率。
参考文献
[1] Light-field camera-based 3D volumetric particle image velocimetry with dense ray tracing reconstruction technique[J] . Shengxian Shi,Junfei Ding,T. H. New,Julio Soria. Experiments in Fluids . 2017 (7)
[2] On the resolution of plenoptic PIV[J]. Eric A Deem,Yang Zhang,Louis N Cattafesta,Timothy W Fahringer,Brian S Thurow. Measurement Science and Technology . 2016 (8)
[3] Volumetric particle image velocimetry with a single plenoptic camera[J] . Timothy W Fahringer,Kyle P Lynch,Brian S Thurow. Measurement Science and Technology . 2015 (11)
[4] Color-coded three-dimensional micro particle tracking velocimetry and application to micro backward-facing step flows[J] . Wei-Hsin Tien,Dana Dabiri,Jay R. Hove. Experiments in Fluids . 2014 (3)
[5] Microfluidics for medical diagnostics and biosensors[J] . Catherine Rivet,Hyewon Lee,Alison Hirsch,Sharon Hamilton,Hang Lu. Chemical Engineering Science . 2010
[6] Light field microscopy[J] . Marc Levoy,Ren Ng,Andrew Adams,Matthew Footer,Mark Horowitz. ACM Transactions on Graphics (TOG) . 2006 (3)

